Robotic Solutions for 3D Space Analysis
PatchX
Aim
The project was aimed to develop a methodology to detect damages in walls with the help of Yolo’s trained models furthering to gain the quantitative and economic analysis of the development any project.
Workflow
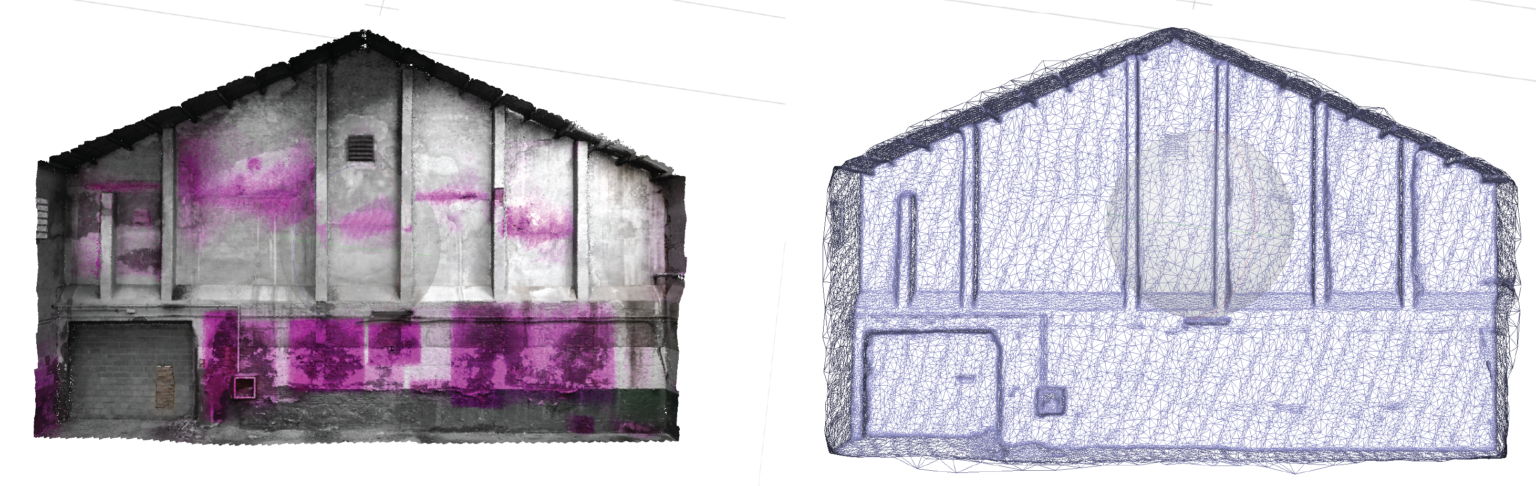
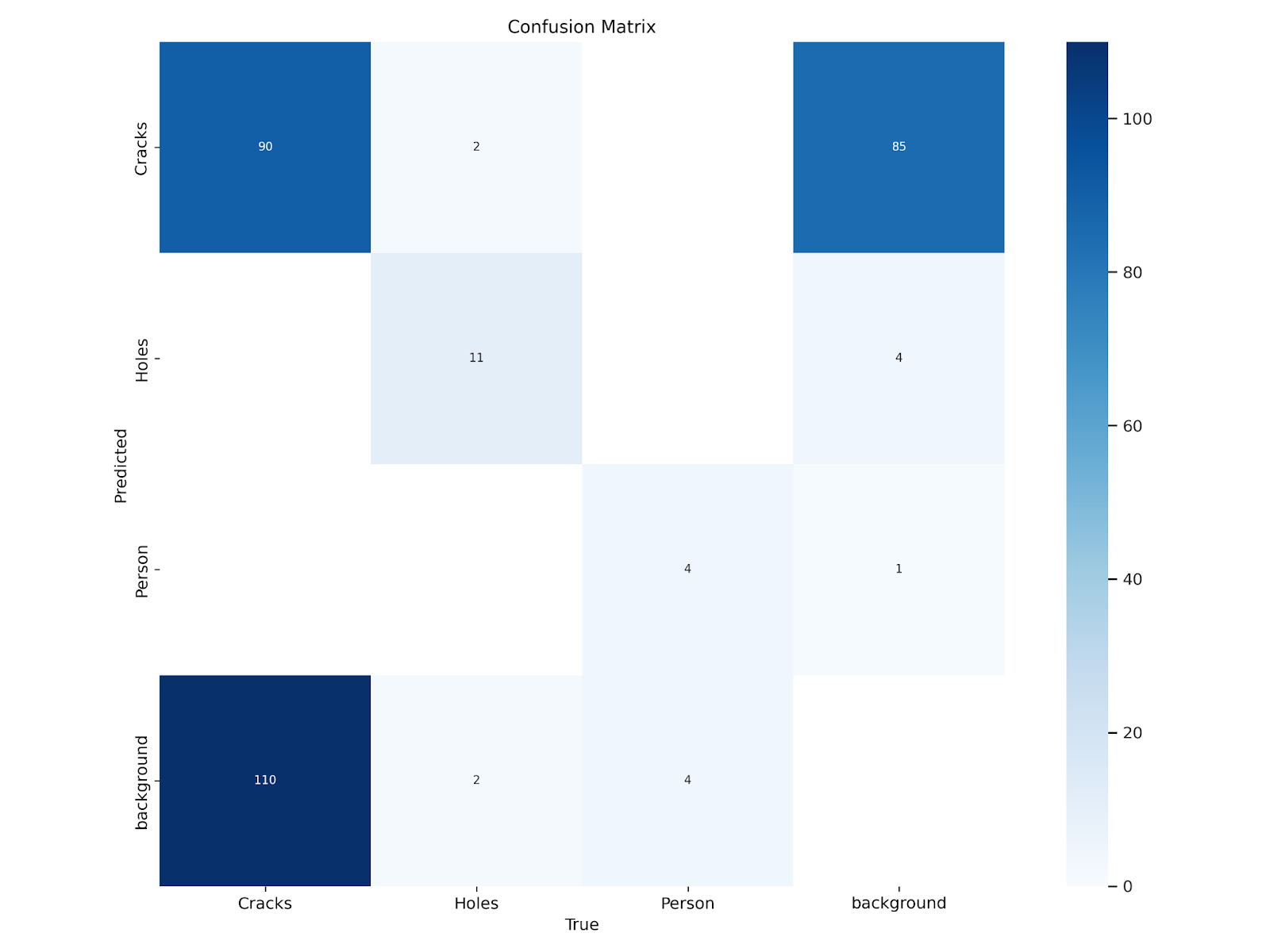
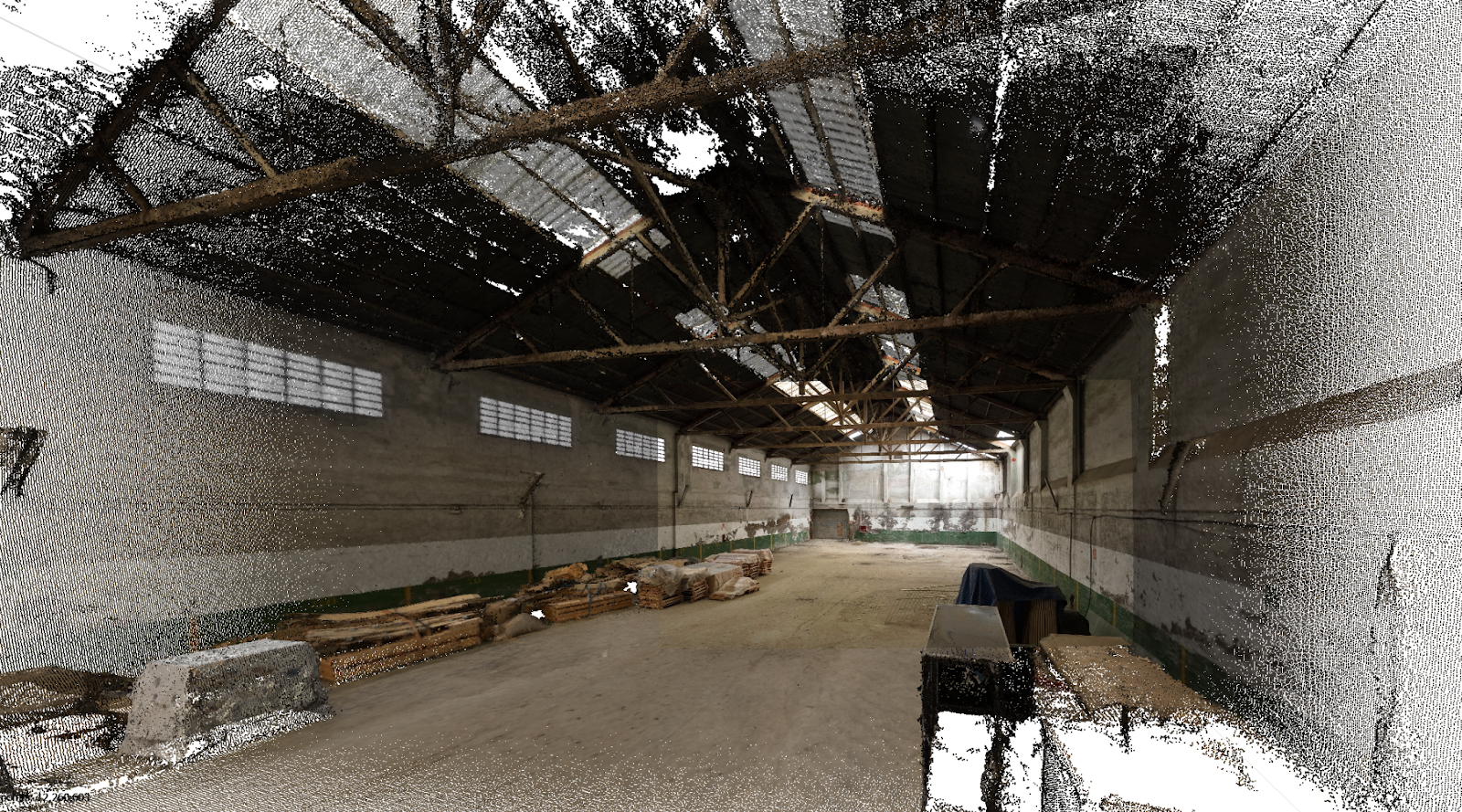
Initially, we conducted a site scan using an RGB camera of Dji drone the site was mapped section by section to extrapolate the data, capturing data from the images. This data was then analyzed in Agisoft to generate a comprehensive overview. Concurrently, we utilized Roboflow to train our model with 86 diverse images, categorizing them into classes such as damages, holes, and people.
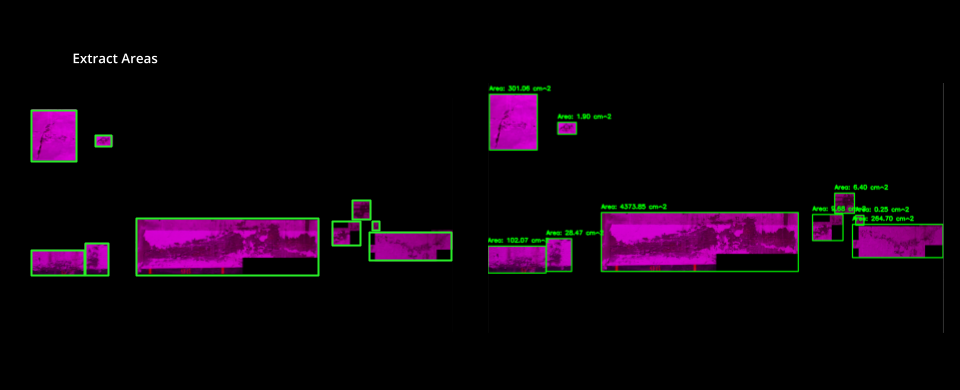
This training enabled us to obtain YOLO outputs, accurately identifying specified classes. Subsequently, we applied interpolation techniques to the datasets to pinpoint damaged areas within the point cloud. Following this, we analyzed the point cloud data to calculate the respective areas, yielding precise measurements.